Maria Skłodowska-Curie ENDEAVOR Project
Event-Driven Active Vision for Object Perception (ENDEAVOR)
Principal Investigator: Dr. Giulia D’Angelo
Host Institution: Czech Technical University in Prague (CTU)
Fellowship: Marie Skłodowska-Curie Action (MSCA)
Overview
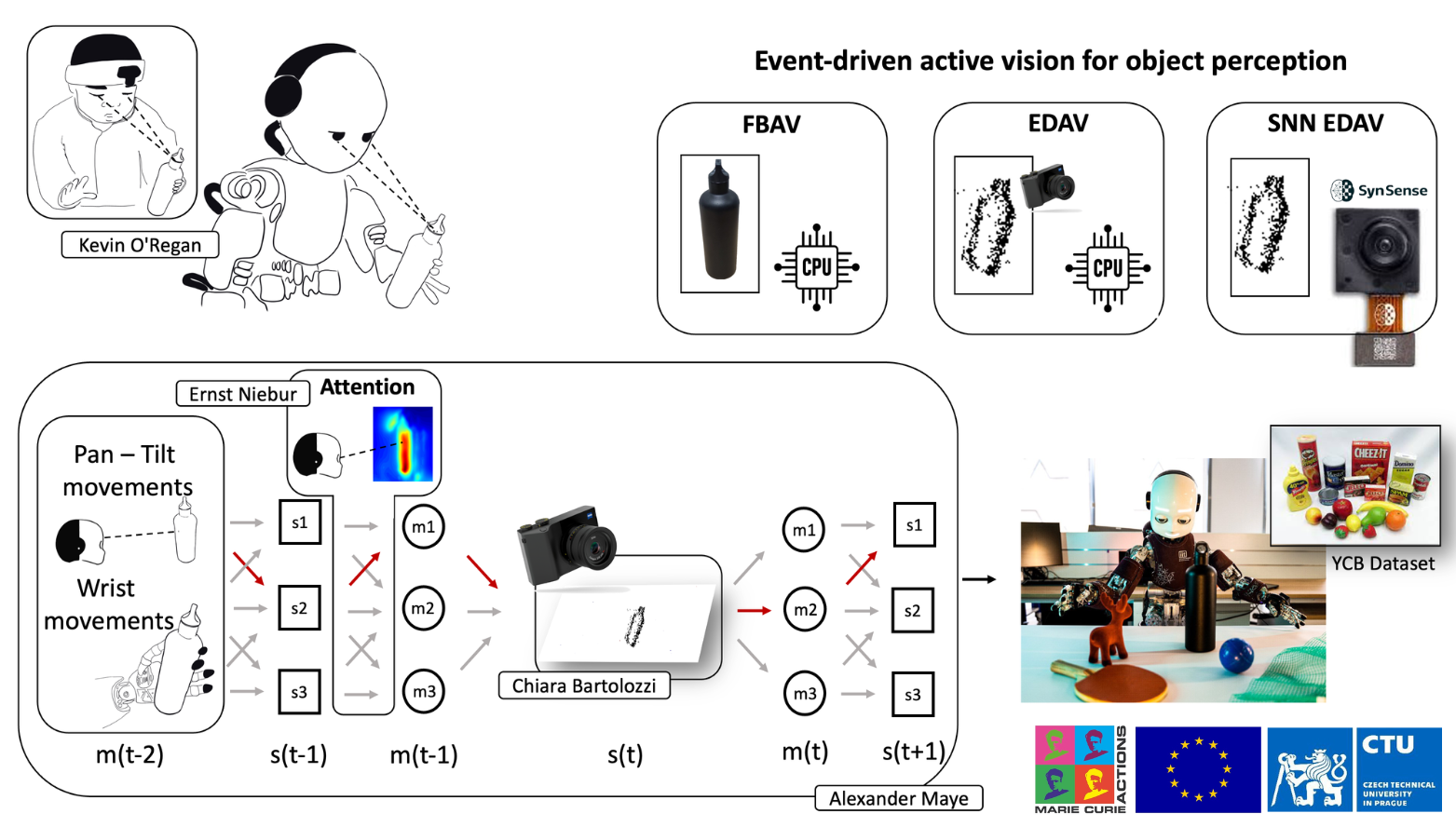
ENDEAVOR is a cutting-edge project that enhances robotic vision using event-driven cameras, spiking neural networks, and infant-inspired active exploration mechanisms. Unlike traditional vision systems that rely on static frames, ENDEAVOR enables robots like iCub to move, observe, and interact with objects in a bioinspired and energy-efficient manner.
Objectives
- O1 – EDAV Model: Adapt a frame-based vision model to event-driven input using iCub’s head and wrist movements.
- O2 – SNN EDAV: Implement a spiking neural network version using neuromorphic hardware for real-time, low-power operation.
- O3 – Benchmarking: Compare models based on accuracy, latency, and energy use on the YCB object dataset.
Technologies
- DAVIS346 event-driven cameras
- Speck neuromorphic chip with sCNN support
- iCub humanoid robot with 3D-printed mounts
- Sensorimotor Contingency Theory (SMCT) for perception-action coupling
Impact
ENDEAVOR bridges neuroscience, robotics, and AI to push forward energy-efficient perception in robotics. The project supports the EU’s Sustainable Development Goals by advancing low-power intelligent systems, and aims to establish benchmarks for neuromorphic robotic vision.